We aim to develop the science of autonomy toward a future with robots and AI systems integrated into everyday life, supporting people with cognitive and physical tasks.
Our work spans: computational design and fabrication of robots; algorithms for perception, planning reasoning and control with guarantees; algorithms for auditable machine learning; and algorithms for collaborating machines and people. Our innovations enable new applications in smart living, transportation, healthcare, manufacturing, monitoring, exploration, and much more.
We focus on developing the science of network, distributed, and collaborative robotics by asking: how can many machines collaborate to achieve a common goal? Our research addresses the development of algorithms and systems that enable collaboration, increase autonomous capabilities, and rethink the ways in which we design and interact with the physical world.
The robot garden provides an aesthetically pleasing educational platform that can visualize computer science concepts and encourage young students to pursue programming and robotics.
The Robot Compiler allows non-engineering users to rapidly fabricate customized robots, facilitating the proliferation of robots in everyday life. It thereby marks an important step towards the realization of personal robots that have captured imaginations for decades.
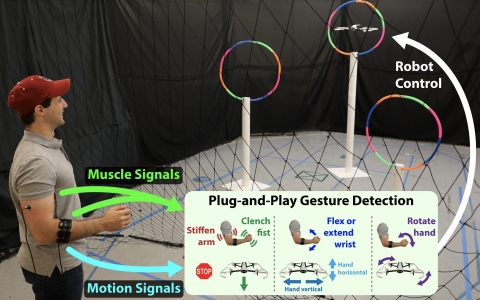
This project aims to let people correct robot mistakes with nothing more than their brain signals - to allow robots to adapt to humans rather than the other way around
Our goal is to create a theoretical framework and effective machine learning algorithms for robust, reliable control of autonomous vehicles. Key threads include developing metrics of confidence; and designing deep learning algorithms for parallel autonomy.
We extract the underlying hidden relations from the given location-based datasets (e.g. GPS data) and we estimate (approximate) the hidden a social network in the data by using a particular data reduction algorithm (i.e., by using coresets).
A robot's physical form and its motion are innately coupled - in order to change its physical design, one must often change the way it moves, and vice versa. Can computers automatically and simultaneously design robot structure and motion?
In this project, we aim to develop a framework that can ensure and certify the safety of an autonomous vehicle. By leveraging research from the area of formal verification, this framework aims to assess the safety, i.e., free of collisions, of a broad class of autonomous car controllers/planners for a given traffic model.
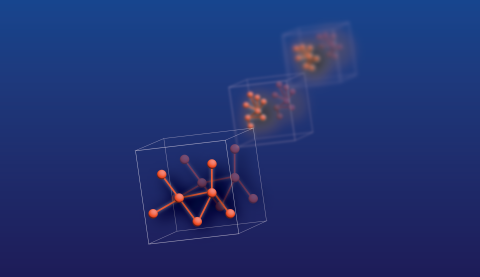
MIT CSAIL and LIDS researchers developed a mathematically grounded system that lets soft robots deform, adapt, and interact with people and objects, without violating safety limits.
Will the future of robotics be written in code or in data? A debate at ICRA among MIT professors and their international colleagues revealed that both will likely help unlock robots' real-world potential — but which takes the lead, and when, isn't clear yet.
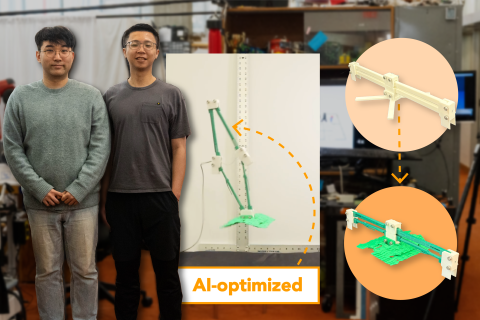
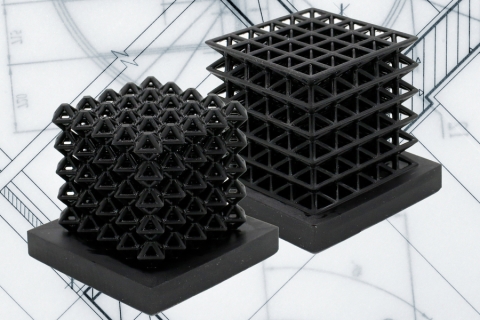
MIT CSAIL researchers combined GenAI and a physics simulation engine to refine robot designs. The result: a machine that out-jumped a robot designed by humans.
MIT professor and CSAIL Director Daniela Rus has been inducted into the prestigious Académie Nationale de Médecine (ANM) as a foreign member. The honor reflects her dedication to applications of AI for the good of humanity and her strong ties to France’s scientific community.
Daniela Rus, Director of CSAIL and MIT EECS Professor, recently received the 2025 IEEE Edison Medal. The award recognizes her leadership and pioneering work in modern robotics.
Daniela Rus, Director of CSAIL and MIT EECS Professor, was recently named a co-recipient of the 2024 John Scott Award by the Board of Directors of City Trusts. This prestigious honor celebrates scientific innovation and stands as a testament to the enduring connection between scientific progress and human potential.
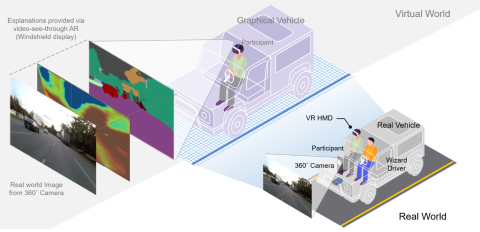
MIT CSAIL and GIST researchers were awarded for their augmented reality method of evaluating algorithmic explanations in autonomous vehicles. The study found that users trust AVs more when they offer timely, relevant information about perception and traffic risks.
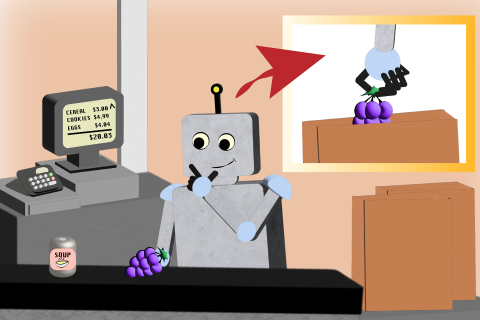
CSAIL researchers’ soft robotic system can handle a continuous stream of unpredictable objects on a conveyor belt, potentially guiding robots with carefully packing groceries and recycled materials.
Designed to ensure safer skies, “Air-Guardian” blends human intuition with machine precision, creating a more symbiotic relationship between pilot and aircraft.
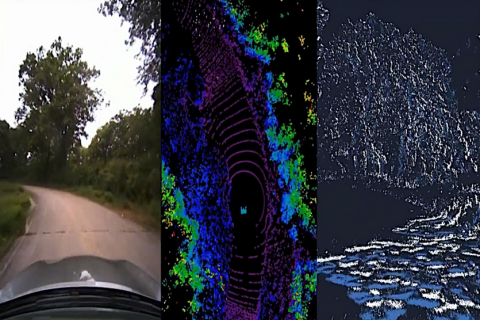
Daniela Rus, CSAIL Director and MIT professor, and a team of researchers from the Singapore-MIT Alliance for Research and Technology and the National University of Singapore earned an “Outstanding Navigation Paper” at the ICRA 2023 for their work on a method that evaluates the uncertainty measurements of the 3D LiDAR technology in autonomous vehicles.
MIT researchers exhibit a new advancement in autonomous drone navigation, using brain-inspired liquid neural networks that excel in out-of-distribution scenarios.
CSAIL Director Daniela Rus has been honored with the 2023 IEEE Robotics and Automation Award for her innovative work towards building the foundation for distributed, networked autonomous systems.
MIT scientists unveil the first open-source simulation engine capable of constructing realistic environments for deployable training and testing of autonomous vehicles.
If you see a self-driving car out in the wild, you might notice a giant spinning cylinder on top of its roof. That’s a lidar sensor, and it works by sending out pulses of infrared light and measuring the time it takes for them to bounce off objects. This creates a map of 3D points that serve as a snapshot of the car’s surroundings.
Using UVC light, the team's system can disinfect a warehouse floor in half an hour - and could one day be used in grocery stores, schools and other spaces
Developed at MIT’s Computer Science and Artificial Intelligence Laboratory, a team of robots can self-assemble to form different structures with applications in inspection, disaster response, and manufacturing
For all the progress made in self-driving technologies, there still aren’t many places where they can actually drive. Companies like Google only test their fleets in major cities where they’ve spent countless hours meticulously labeling the exact 3-D positions of lanes, curbs, off-ramps, and stop signs.
Laparoscopy is a surgical technique in which a fiber-optic camera is inserted into a patient’s abdominal cavity to provide a video feed that guides the surgeon through a minimally invasive procedure. Laparoscopic surgeries can take hours, and the video generated by the camera — the laparoscope — is often recorded. Those recordings contain a wealth of information that could be useful for training both medical providers and computer systems that would aid with surgery, but because reviewing them is so time consuming, they mostly sit idle.
Computer scientists have been working for decades on automatic navigation systems to aid the visually impaired, but it’s been difficult to come up with anything as reliable and easy to use as the white cane, the type of metal-tipped cane that visually impaired people frequently use to identify clear walking paths. White canes have a few drawbacks, however. One is that the obstacles they come in contact with are sometimes other people. Another is that they can’t identify certain types of objects, such as tables or chairs, or determine whether a chair is already occupied.
In recent years, a host of Hollywood blockbusters — including “The Fast and the Furious 7,” “Jurassic World,” and “The Wolf of Wall Street” — have included aerial tracking shots provided by drone helicopters outfitted with cameras. Those shots required separate operators for the drones and the cameras, and careful planning to avoid collisions. But a team of researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and ETH Zurich hope to make drone cinematography more accessible, simple, and reliable.
Anyone who’s watched drone videos or an episode of “BattleBots” knows that robots can break — and often it’s because they don’t have the proper padding to protect themselves.But this week researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) will present a new method for 3-D printing soft materials that make robots safer and more precise in their movements — and that could be used to improve the durability of drones, phones, shoes, helmets, and more.The team’s “programmable viscoelastic material” (PVM) technique allows users to program every single part of a 3D-printed object to the exact levels of stiffness and elasticity they want, depending on the task they need for it.
A team that includes CSAIL researchers has designed a “flying monkey” robot that walks, grasps, flies, and clocks in at less than 1/10th of a pound. Modeled after the male stag beetle, the robot is part of a new class of robots capable of interacting with and modifying their surroundings, by using capabilities of legged and aerial robots.Part of the platform uses one of the world’s smallest quadrotor aircraft (“the Dragonfly”) and is powered by a single motor. Crawling, flying, and grasping allows the flying monkey to perform complex tasks such as hopping over obstacles, crawling under or through small openings, and picking up small objects.
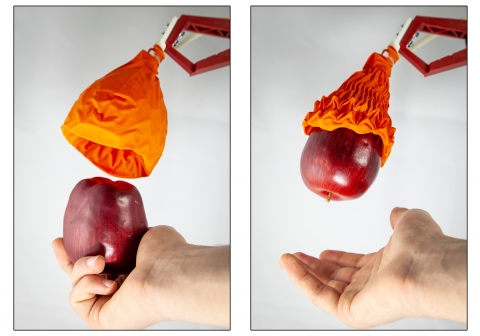
Robots have many strong suits, but delicacy traditionally hasn’t been one of them. Rigid limbs and digits make it difficult for them to grasp, hold, and manipulate a range of everyday objects without dropping or crushing them.Recently, CSAIL researchers have discovered that the solution may be to turn to a substance more commonly associated with new buildings and Silly Putty: silicone.At a conference this month, researchers from CSAIL Director Daniela Rus’ Distributed Robotics Lab demonstrated a 3-D-printed robotic hand made out of silicone rubber that can lift and handle objects as delicate as an egg and as thin as a compact disc.
A team of CSAIL researchers have developed a printable origami robot that folds itself up from a flat sheet of plastic when heated and measures about a centimeter from front to back.Weighing only a third of a gram, the robot can swim, climb an incline, traverse rough terrain, and carry a load twice its weight. Other than the self-folding plastic sheet, the robot’s only component is a permanent magnet affixed to its back. Its motions are controlled by external magnetic fields.“The entire walking motion is embedded into the mechanics of the robot body,” says Cynthia R. Sung, a CSAIL graduate student and one of the robot’s co-developers. “In previous [origami] robots, they had to design electronics and motors to actuate the body itself.”
CSAIL researchers Daniela Rus and Erik Demaine, in partnership with Harvard University's Robert Wood, have developed a small resin-fiberglass sheet programmed to fold itself into three-dimensional shapes.
At this point, the object can only take on two shapes—but it's a major development in the burgeoning field of computational origami. And if you can teach a flat sheet to form itself into a multitude three-dimensional shape, the applications are endless. Read more about the research here, or check out the video below to watch the sheet in action.



























 and research scientist Stephanie Gil (right) have developed a technique for preventing malicious hackers from commandeering robot teams’ communication networks.")
 that transfer less than half of the energy that would normally be transferred to the ground.")


