Professor Tedrake's research is focused on finding elegant control solutions for interesting (underactuated, stochastic, and/or difficult to model) dynamical systems that he can build and experiment with. He is particularly interested in finding connections between mechanics (especially non-smooth mechanics) and machine learning/optimization theory which enable robust control design for complex mechanical systems. These days he is primarily focused in merging more of the powerful tools from systems theory with machine learning for robotic manipulation. Please see the description of the Robot Locomotion Group for more information.
A robot's physical form and its motion are innately coupled - in order to change its physical design, one must often change the way it moves, and vice versa. Can computers automatically and simultaneously design robot structure and motion?
Our goal is to understand the nature of intelligent behavior in the physical world, through the study of human intelligence and the design and implementation of intelligent robots.
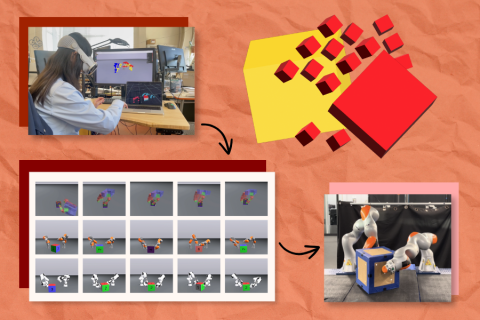
New tool from MIT CSAIL creates realistic virtual kitchens and living rooms where simulated robots can interact with models of real-world objects, scaling up training data for robot foundation models.
MIT’s “PhysicsGen” helps robots handle items in homes and factories by tailoring training data to a particular machine. The system turns demonstrations captured in VR into thousands of simulations of the robot's most optimal movements.
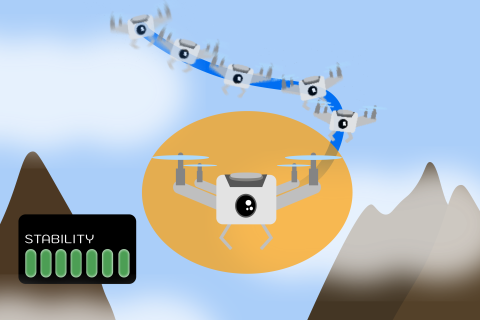
Neural network controllers provide complex robots with stability guarantees, paving the way for the safer deployment of autonomous vehicles and industrial machines.
Eight years ago, Ted Adelson’s research group at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) unveiled a new sensor technology, called GelSight, that uses physical contact with an object to provide a remarkably detailed 3-D map of its surface. Now, by mounting GelSight sensors on the grippers of robotic arms, two MIT teams have given robots greater sensitivity and dexterity. The researchers presented their work in two papers at the International Conference on Robotics and Automation last week.