We research building machines which exploit their natural dynamics to achieve extraordinary agility and efficiency.
We believe that deep connections are possible -- enabling very efficient optimization by exploiting structure in the governing equations -- and are working on both optimization algorithms and control applications. Our current projects include dynamics and control for humanoid robots, robotic manipulation, and dynamic walking over rough terrain, flight control for aggressive maneuvers in unmanned aerial vehicles, feedback control for fluid dynamics and soft robotics, and connections between perception and control.
Our goal is to better understand adversarial examples by 1) bounding the minimum perturbation that needs to be added to a regular input example to cause a given neural network to misclassify it, and 2) generating some adversarial input example with minimum perturbation.
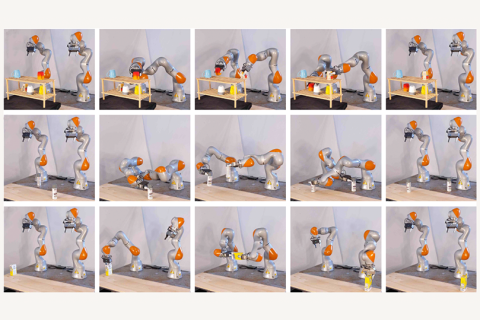
New tool from MIT CSAIL creates realistic virtual kitchens and living rooms where simulated robots can interact with models of real-world objects, scaling up training data for robot foundation models.
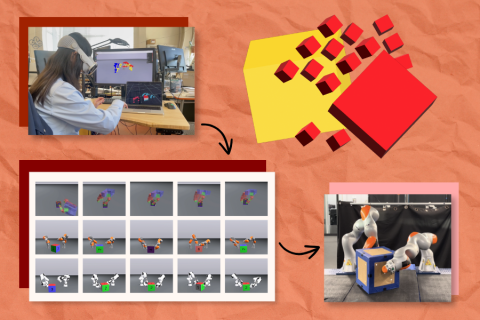
MIT’s “PhysicsGen” helps robots handle items in homes and factories by tailoring training data to a particular machine. The system turns demonstrations captured in VR into thousands of simulations of the robot's most optimal movements.
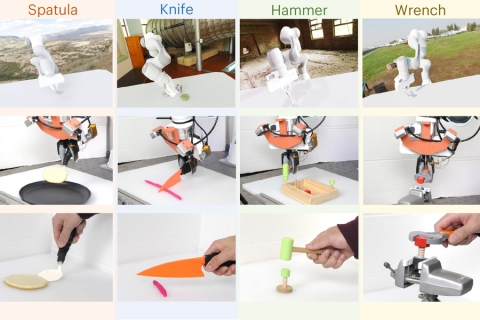
To simulate more training videos for robots, “GenSim2” uses multimodal and reasoning LLMs that can see and ponder about real-world data. The framework then helps teach a robot to imitate these synthetic data to better learn household and manufacturing tasks.
Neural network controllers provide complex robots with stability guarantees, paving the way for the safer deployment of autonomous vehicles and industrial machines.
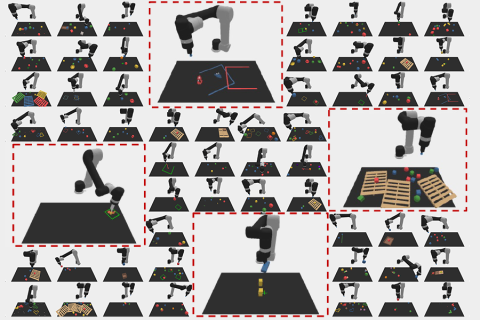
GenSim uses the code within LLMs to automatically generate new robotic behaviors and outline each step within long-horizon goals to assist with manufacturing, household, and logistical tasks.
MIT CSAIL researchers established new connections between combinatorial and continuous optimization, which can find global solutions for complex motion planning puzzles.