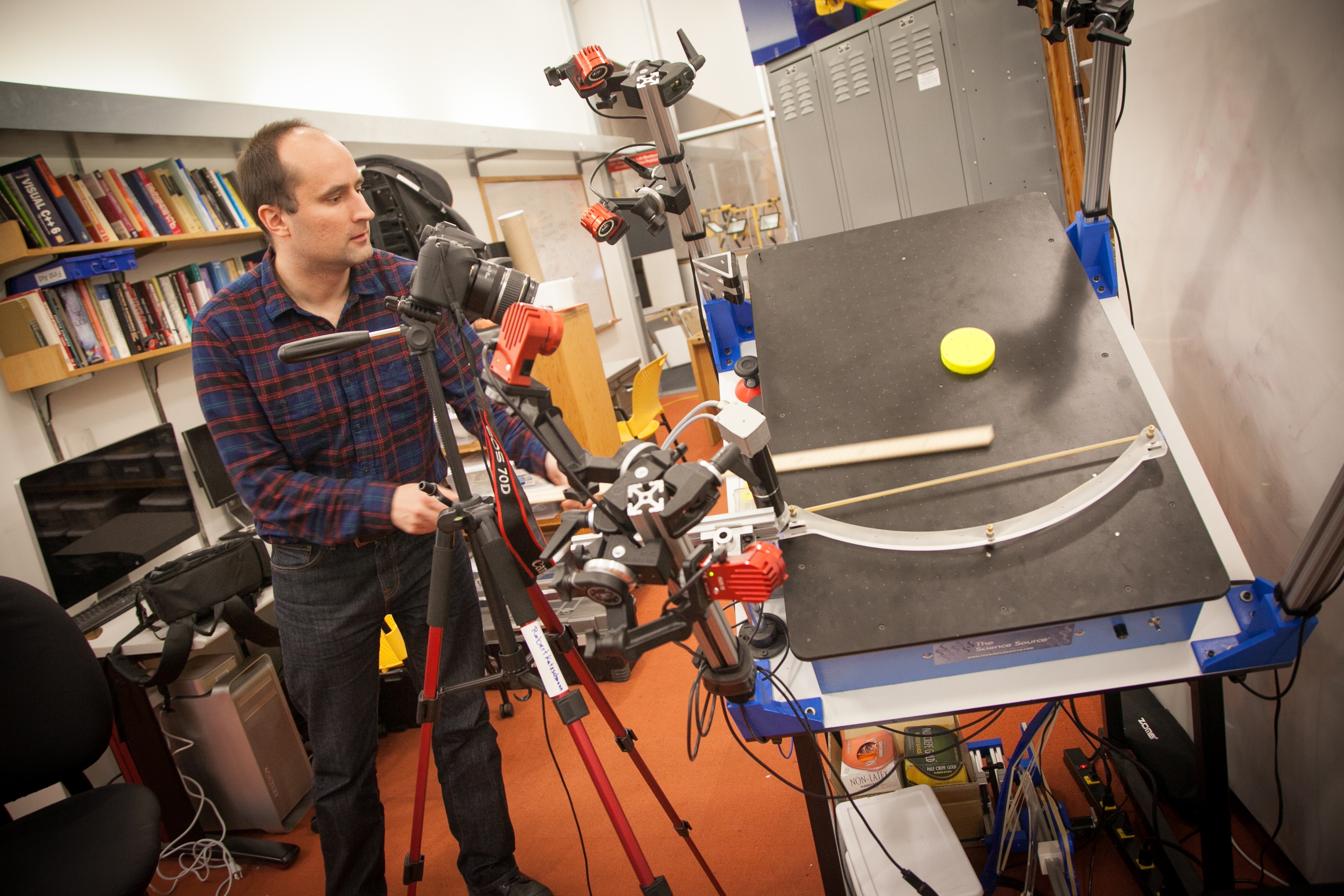
We are juggling a puck sliding on a table, using only a pretensioned rubber band.
We develop implicit-surface models of a soft skin in order to capture the rich kinematics of the physical interaction without increasing the modeling dimension. The goal is to make optimization-based parameter estimation and control design tractable for soft robots. This project is about the development and experimental demonstration of a soft contact model that can describe large deformations at contact surfaces of dynamic robotic systems. Model-based control is used to automatically juggle a puck using a soft robotic arm, all under the action of gravity. We demonstrate with our prototype robust juggling both in simulation and the actual experiment.