We conduct interdisciplinary research aimed at discovering the principles underlying the design of artificially intelligent robots.
In the Learning and Intelligent Systems (LIS) group, our research brings together ideas from motion planning, machine learning and computer vision to synthesize robot systems that can behave intelligently across a wide range of problem domains. We are driven by the immense challenges faced by robots with imperfect sensors and incomplete knowledge of the world operating in unstructured environments.
Our goal is to design algorithms that enable robots to operate in human environments by simultaneously reasoning about high-level task actions as well as low-level motions.
The National Academy of Engineering recently elected Tomás Lozano-Pérez, MIT professor and CSAIL principal investigator, as a member for his work in robot motion planning and molecular design.
When you ask a robot to place blocks in matching bowls, for example, MIT’s “PRoC3S” method helps an LLM create a viable action plan by testing each step in a simulation. This strategy could eventually aid in-home robots to complete more ambiguous chore requests.
New algorithm helps robots practice skills like sweeping and placing objects, potentially helping them improve at important tasks in houses, hospitals, and factories.
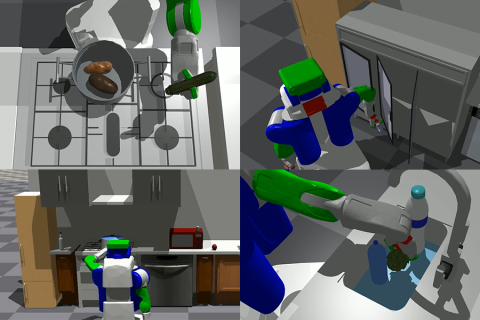
PIGINet leverages machine learning to streamline and enhance household robots' task and motion planning, by assessing and filtering feasible solutions in complex environments.
Yilun Du, a PhD student and MIT CSAIL affiliate, discusses the potential applications of generative art beyond the explosion of images that put the web into creative hysterics.
This week it was announced that MIT professor and CSAIL principal investigator Tomas Lozano-Perez has been awarded the 2021 IEEE Robotics and Automation Award for his “foundational contributions to robot motion planning and visionary leadership in the field.”