Our projects are centered around the problems of navigation and mapping for autonomous mobile robots operating in underwater and terrestrial environments.
Our research focuses primarily on four themes which relate to the implementation of SLAM across multiple environments.
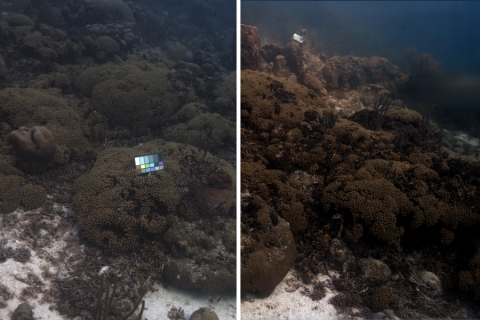
Marine robotics: we address the challenges of localization and mapping in the underwater environment.
Theoretical foundations: we tackle fundamental problems in SLAM that are applicable across domains such as robustness, scalability, consistency, map representation and others.
Dense mapping: our work in this area focuses on object-based representations and how these can be used to aid localization.
Visual SLAM: We also have ongoing work based on using only a camera (and sometimes an IMU) to perform Visual SLAM both in indoor environments and also outdoors for applications such as driverless cars.
MIT Task Force on the Work of the Future examines job changes in the AV transition and how training can help workers move into careers that support mobility systems.