The prompt: Design a robot from scratch.
The result: A blueprint for a machine unlike any walking animal.
When humans design robots, they often endure a lengthy trial-and-error process to test out each part and optimize the whole machine for movement. While artificial intelligence has often assisted writers, artists, and doctors in their creative processes, robotics engineers have not been as fortunate — until an MIT CSAIL and Northwestern University team made headway in changing that.
In a paper recently published in the Proceedings of the National Academy of Sciences, the group presented an algorithm that can rapidly and efficiently produce blueprints for these bots. To showcase their system’s speed, the team prompted it to create a robot that can walk across a flat surface. Remarkably, it generated an outline for a machine that could successfully walk in less than a minute.
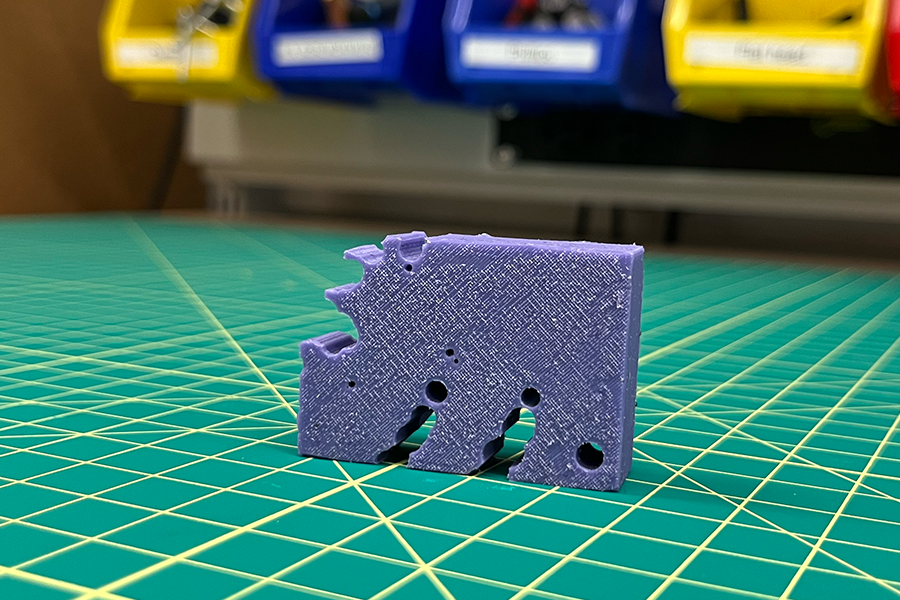
While the system initially drafted a small block incapable of walking, it then iterated on its design by assessing its flaws and updating the structure. The simulated robot soon bounced, hopped, and shuffled, until it finally made tiny steps. By the end of the process, the robot had three legs, fins on its back, a flat face, and holes around its body, walking half its body length per second in what the team deems an “instant evolution.”
Still, the system’s blueprint needed to be tested in the real world, so the team fabricated a mold and filled it with liquid silicone rubber. The mold eventually solidified into a squishy and flexible structure. Then, the team pumped air into their object, and its legs expanded and contracted to generate locomotion.
“When we started this project, I was really curious how much of a robot’s form could be designed by a computer with as little human input as possible,” says Harvard University postdoc and former MIT CSAIL member Andrew Spielberg PhD ‘21, who is an author on the paper. “What I didn’t expect was just how quick this method would be. It opens up exciting possibilities for the future — that this algorithm could even just be one building block of an even more sophisticated design algorithm in the future.”
Previous attempts at applying artificial intelligence for robotic design typically needed supercomputers that consumed far more energy and large datasets. Additionally, the resulting designs lacked imagination, drawing heavily from the work of humans. In contrast, this new system’s creativity comes from an algorithm that does not base its plans on any particular anatomical forms, running on a lightweight personal computer to ideate entirely new structures from scratch.
The algorithm’s planning process begins by generating a random body without feet, but consistently outputs a machine capable of legged locomotion. Then, it iterates on its designs multiple times before presenting a final blueprint. With each iteration, the robot evolves using a differentiable simulator, meaning it’s tailored to adjust to the internal (like its muscles and elasticity) and external forces (like gravity and collisions) it computes. The system then automatically gives a fitness score to measure the robot’s locomotive ability. With its efficient and practical (albeit alien) plans, the algorithm could assist in medical, environmental, vehicular, and space-based domains.
“When people look at this robot, they might see a useless gadget. I see the birth of a brand-new organism” says Sam Kriegman, Northwestern University assistant professor and corresponding author of the study. “We told the AI that we wanted a robot that could walk across land. Then we simply pressed a button and presto! It generated a blueprint for a robot in the blink of an eye that looks nothing like any animal that has ever walked the earth.”
Spielberg and Kriegman’s paper also credits first author David Matthews, Northwestern University researcher, and senior authors Daniela Rus, MIT Andrew (1956) and Erna Viterbi Professor of Electrical Engineering and Computer Science and CSAIL Director, and Josh Bongard, University of Vermont professor. The team’s work was supported, in part, by Schmidt Futures, IARPA, DARPA, the National Science Foundation, and the Office of the Vice President for Research at the University of Vermont.