John J. Leonard is Samuel C. Collins Professor of Mechanical and Ocean Engineering in the MIT Department of Mechanical Engineering. He is also a member of the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL). His research addresses the problems of navigation and mapping for autonomous mobile robots. He holds the degrees of B.S.E.E. in Electrical Engineering and Science from the University of Pennsylvania (1987) and D.Phil. in Engineering Science from the University of Oxford (1994). He is an IEEE Fellow (2014).
Our goal is to understand the nature of intelligent behavior in the physical world, through the study of human intelligence and the design and implementation of intelligent robots.
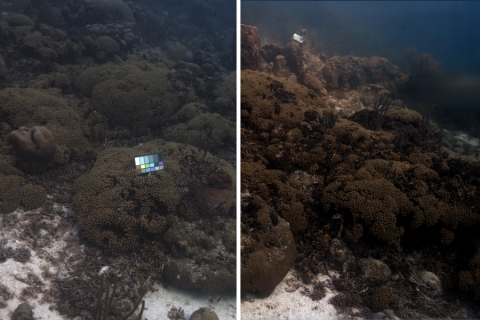
Our projects are centered around the problems of navigation and mapping for autonomous mobile robots operating in underwater and terrestrial environments.
Dream Team of Engineers, Computer Scientists, and Neuroscientists from BU, MIT, and Australia to develop neuro-inspired capabilities for Land, Sea, and Air-based Autonomous Robots.










{kind=link}